MENU
MENU 

EECS 460: Control Systems Analysis and Design
Instructors:
Professor Jessy Grizzle
Professor Semyon Meerkov
Professor Necmiye Ozay
Coverage
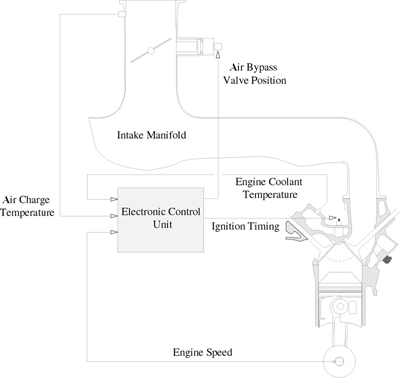
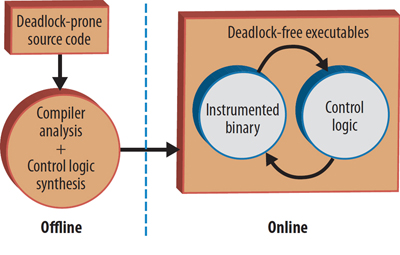
Control is enabling technology. Most modern devices from the computers and Internet to space systems and power plants would not operate without efficient automatic control. The goal of this course is to provide students knowledge and skills necessary to become a control system designer in the automotive, semiconductor, chemical, aerospace and other manufacturing industries as well as in the areas of power systems, communication networks, and computer software/hardware.
Lab
The course includes a computer-based lab and one hardware experiment. Within the computer-based lab, the students design and evaluate various control systems under realistic constraints. In the hardware experiment, the students develop and implement a controller for the MagLev, a magnetic levitation device.
Textbook(s)
F. Golnaraghi and B. C. Kuo, Automatic control systems, Tenth Edition, 2017, McGraw Hill.
Syllabus
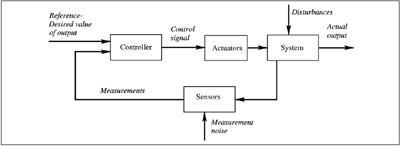
1. Main principles of control: Feedforward and feedback control; advantages and limitations of feedback and feedforward control; structure of feedback systems.
2. Mathematical preliminaries: Review of LTI systems description in both time and frequency domains; linearization; block diagrams and signal flow graph manipulations
3. Mathematical modeling: First-principle and phenomenological modeling; models of sensors, actuators, and standard controllers
4. Stability of control systems: Input-output and internal stability; Routh-Hurwits criterion
5. Analysis of control systems in the time domain: Steady state response, error coefficients and system type; transient response characteristics; relation between pole/zero configuration and transient response
6. Root-locus technique: Rules for root-locus sketching; root contours and applications
7. Design of control systems in the time domain: Design specifications in the time domain; design of P, PI, PD, and PID controllers; design of lead, lag, and lead-lag compensators
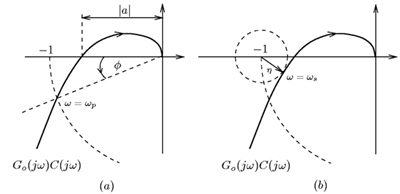
8. Analysis of control systems in the frequency domain: Characteristics of stationary response in the frequency domain; stability analysis in the frequency domain (Nyquist stability criterion)
9. Design of control systems in the frequency domain: Design specifications in the frequency domain: design of P, PI, PD, and PID controllers; design of lead, lag, and lead-lag compensators